

นักวิจัยพัฒนาแขนกลสำหรับเก็บผักและผลไม้แบบไม่ใช้แรงบีบ ช่วยลดความเสียหายก่อนถึงมือผู้บริโภค และเพิ่มประสิทธิภาพด้านการเก็บเกี่ยวในอนาคต
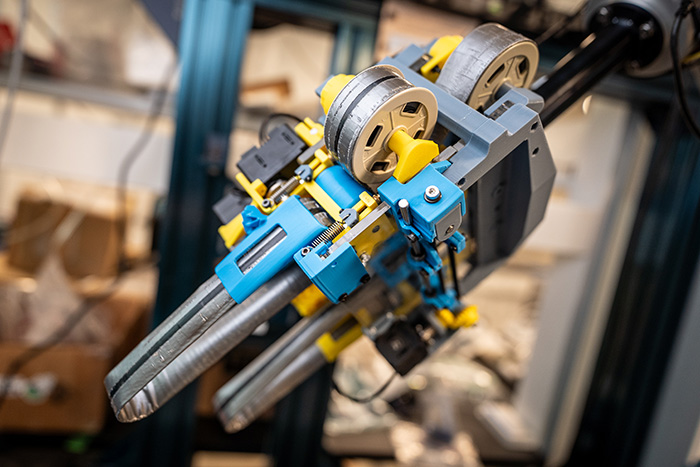
นักวิจัยจากมหาวิทยาลัยแคลิฟอร์เนีย ซานดิเอโก (University of California, San Diego - UCSD) พัฒนาแขนกลต้นแบบที่ใช้กลไกคล้ายเทปวัดระยะใช้สำหรับเก็บผลไม้และผักอย่างนุ่มนวล ลดความเสียหายระหว่างเก็บเกี่ยวก่อนส่งถึงผู้บริโภค เทคโนโลยีนี้ถูกออกแบบมาให้ตอบโจทย์อุตสาหกรรมเกษตรยุคใหม่ที่ต้องการแรงงานที่ทำงานได้แม่นยำและไม่ทำลายผลผลิต
งานวิจัยของทีมวิศวกรหุ่นยนต์จากมหาวิทยาลัย UCSD ได้รับการเผยแพร่ในเว็บไซต์ทางการของมหาวิทยาลัย โดยระบุว่าแขนกลรุ่นใหม่นี้ใช้กลไก “นิ้วเทปวัดระยะ” ซึ่งทำงานด้วยหลักการยืด-หดตัวแบบเดียวกับเทปวัดขนาดโลหะที่มักใช้ในงานช่าง ความยืดหยุ่นและโครงสร้างโค้งงอของเทปช่วยให้แขนกลสามารถโอบอุ้มวัตถุที่มีรูปร่างไม่แน่นอนได้โดยไม่ต้องใช้แรงบีบสูง ทั้งยังเลียนแบบการเคลื่อนไหวของนิ้วมือมนุษย์ได้ในระดับที่ละเอียดอ่อนพอจะหยิบผลไม้ที่บอบบาง เช่น มะเขือเทศ หรือองุ่น ได้อย่างปลอดภัย
จากการทดสอบในห้องปฏิบัติการ แขนกลต้นแบบสามารถหยิบผลผลิตน้ำหนักเบาอย่างเบอร์รี ส้ม และไข่ได้อย่างมั่นคงโดยไม่ทำให้เกิดรอยช้ำบนผิววัตถุ ทีมวิจัยระบุว่าส่วนปลายของนิ้วบนแขนกลถูกออกแบบให้มีแรงดึงกลับเมื่อยืดออกคล้ายเทปวัดระยะ ทำให้ควบคุมการหยิบจับและปล่อยวัตถุได้แม่นยำยิ่งขึ้น ต่างจากแขนกลทั่วไปที่ใช้แรงบีบอัดเป็นหลัก ซึ่งเสี่ยงต่อการทำให้ผลผลิตเกิดความเสียหาย
แขนกลรุ่นใหม่นี้ไม่จำเป็นต้องใช้เซนเซอร์ตรวจจับแรงกดจำนวนมากเหมือนระบบหุ่นยนต์อุตสาหกรรมทั่วไป แต่ใช้การออกแบบเชิงกลไกแทน ทำให้ลดต้นทุนการผลิตและการซ่อมบำรุงในระยะยาว โดยนิ้วแต่ละข้างสามารถถอดเปลี่ยนได้อย่างง่ายดายในกรณีที่ชำรุด ทั้งยังมีโครงสร้างน้ำหนักเบาและสามารถประกอบเข้ากับระบบหุ่นยนต์เกษตรที่มีอยู่แล้วได้โดยไม่ต้องดัดแปลงมากนัก
นักวิจัยกล่าวว่าแนวคิดแขนกลนี้ได้แรงบันดาลใจจากเครื่องมือช่างในชีวิตประจำวัน ที่มีความยืดหยุ่นแต่แข็งแรง และสามารถโค้งงอได้ในลักษณะที่สามารถควบคุมทิศทางได้แม่นยำ หัวหน้างานวิจัยระบุว่าหากพัฒนาต่อยอด เทคโนโลยีนี้สามารถนำใช้ในหุ่นยนต์เก็บเกี่ยวผลไม้แบบอัตโนมัติ ซึ่งสามารถทำงานได้ทั้งกลางวันและกลางคืนโดยไม่ต้องหยุดพัก ช่วยแก้ปัญหาการขาดแคลนแรงงานในภาคเกษตรกรรม

แขนกลต้นแบบยังอยู่ในระหว่างการทดลองภาคสนามในพื้นที่เพาะปลูกของรัฐแคลิฟอร์เนีย และมีแผนร่วมมือกับบริษัทเทคโนโลยีด้านเกษตรของสหรัฐอเมริกาในการพัฒนาเป็นผลิตภัณฑ์เชิงพาณิชย์ ทีมวิจัยเผยว่ายังอยู่ระหว่างศึกษาความเป็นไปได้ในการเพิ่มเซนเซอร์ตรวจจับชนิดของผลผลิต เพื่อให้หุ่นยนต์สามารถเลือกเก็บเฉพาะผลสุกหรือขนาดที่ได้มาตรฐาน ลดการเก็บผลผลิตที่ยังไม่พร้อมเก็บเกี่ยว
หุ่นยนต์แขนกลที่ใช้กลไกคล้ายเทปวัดระยะ เป็นนวัตกรรมใหม่จากนักวิจัยมหาวิทยาลัยแคลิฟอร์เนีย ซานดิเอโก ที่ออกแบบมาเพื่อเก็บผลไม้และผักอย่างอ่อนโยน ลดความเสียหายระหว่างเก็บเกี่ยว เทคโนโลยีนี้ใช้หลักการเชิงกลไกที่เรียบง่าย ลดต้นทุน และสามารถใช้งานร่วมกับระบบหุ่นยนต์ที่มีอยู่ได้อย่างยืดหยุ่น นักวิจัยคาดว่าจะสามารถนำเทคโนโลยีนี้ไปประยุกต์ใช้ในภาคเกษตรกรรมเชิงพาณิชย์ในอนาคต เพื่อแก้ปัญหาขาดแคลนแรงงานและเพิ่มคุณภาพของผลผลิตที่ส่งถึงมือผู้บริโภคอย่างมีประสิทธิภาพ
เรียบเรียงโดย ขนิษฐา จันทร์ทร
ที่มาข้อมูล: newatlas, ucsd, freshplaza
ที่มาภาพ: ucsd, ภาพ 1
“รอบรู้ ดูกระแส ก้าวทันโลก” ไปกับ Thai PBS Sci & Tech








{kind=link}