นักวิทยาศาสตร์อิตาลีพัฒนา “แขนกลหนวดปลาหมึก” ใช้ปุ่มดูดอัจฉริยะคลำทางและจับวัตถุได้อัตโนมัติ โดยไม่ต้องพึ่งกล้องหรือสัญญาณสั่งการจากส่วนกลาง
ท้องทะเลลึกคือหนึ่งในสภาพแวดล้อมที่ท้าทายที่สุดสำหรับหุ่นยนต์สำรวจ กระแสน้ำที่แปรปรวน ทัศนวิสัยที่แทบเป็นศูนย์ และพื้นผิวที่ไม่แน่นอน ล้วนทำให้หุ่นยนต์แบบเดิมที่ใช้การสั่งการแบบรวมศูนย์และโครงสร้างแข็งทำงานได้อย่างจำกัด ทีมนักวิจัยจากสถาบันเทคโนโลยีอิตาลี (Italian Institute of Technology) จึงหันไปหาแรงบันดาลใจที่ธรรมชาติฝึกฝนมากว่า 500 ล้านปี นั่นคือ "ปลาหมึก" สัตว์ที่มีระบบประสาทกระจายอยู่ทั่วลำตัว และสามารถจัดการวัตถุได้อย่างแม่นยำแม้ในสภาพแวดล้อมที่ซับซ้อน
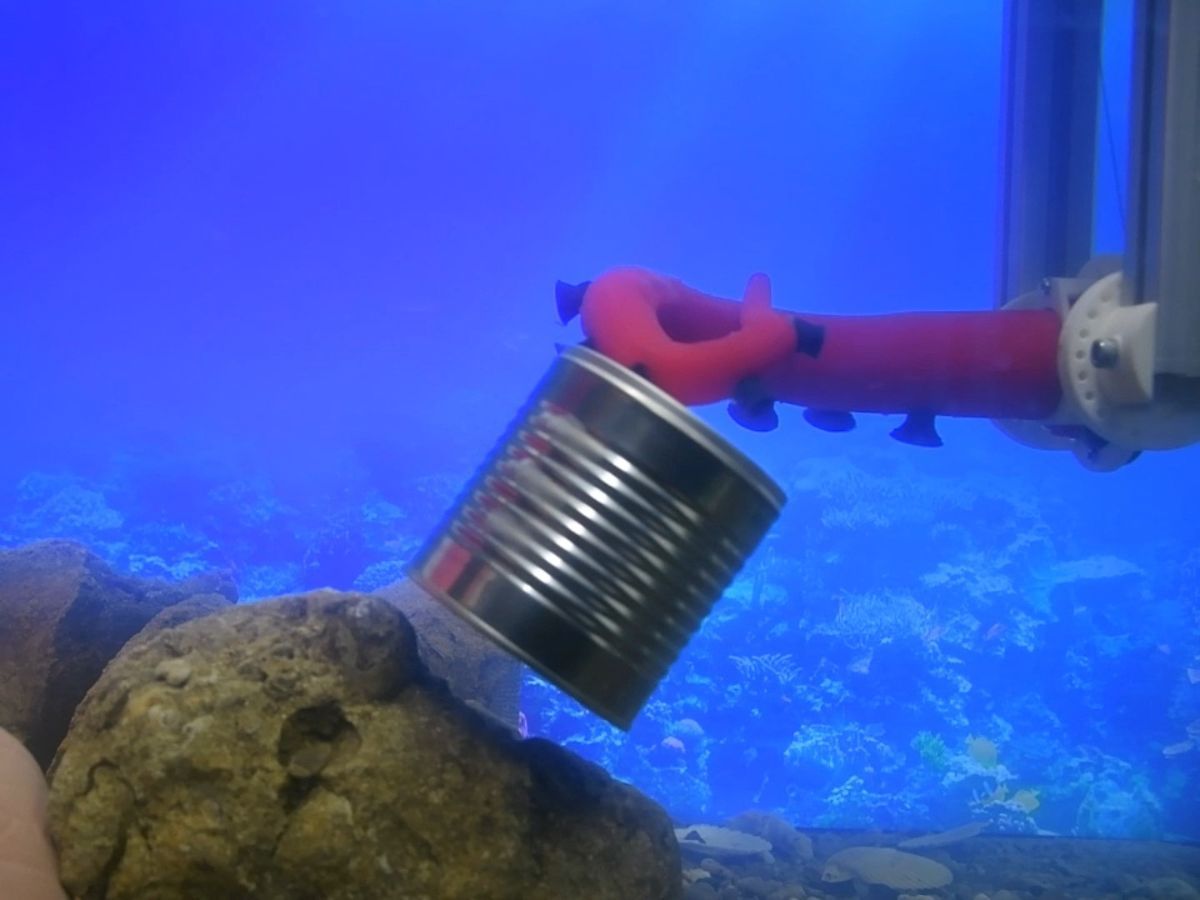
การดูดจับกระป๋องของแขนกลปลาหมึก
เมื่อแขนหุ่นยนต์เริ่ม "คิด" ด้วยปุ่มดูด
ปลาหมึกมีสมองขนาดเล็กอยู่ตรงกลาง แต่กว่า 60% ของเซลล์ประสาทกระจายอยู่ตามแขนทั้งแปด แต่ละแขนสามารถประมวลผลข้อมูลและตอบสนองได้อย่างรวดเร็วโดยไม่ต้องรอคำสั่งจากสมองส่วนกลาง นักวิจัยจากสถาบันเทคโนโลยีอิตาลี (Italian Institute of Technology) ได้นำหลักการนี้มาถ่ายทอดเป็นวัสดุซิลิโคนและวงจรอิเล็กทรอนิกส์ ผลลัพธ์คือแขนกลนุ่มความยาว 41 เซนติเมตร ที่มีปุ่มดูดเทียม 10 อัน ขนาดค่อย ๆ เล็กลงจากโคนไปถึงปลาย ไม่มีกล้อง ไม่มีคอมพิวเตอร์ภายนอก และไม่มีระบบควบคุมแบบรวมศูนย์
เซนเซอร์แสงในปุ่มดูด กุญแจสำคัญของระบบ
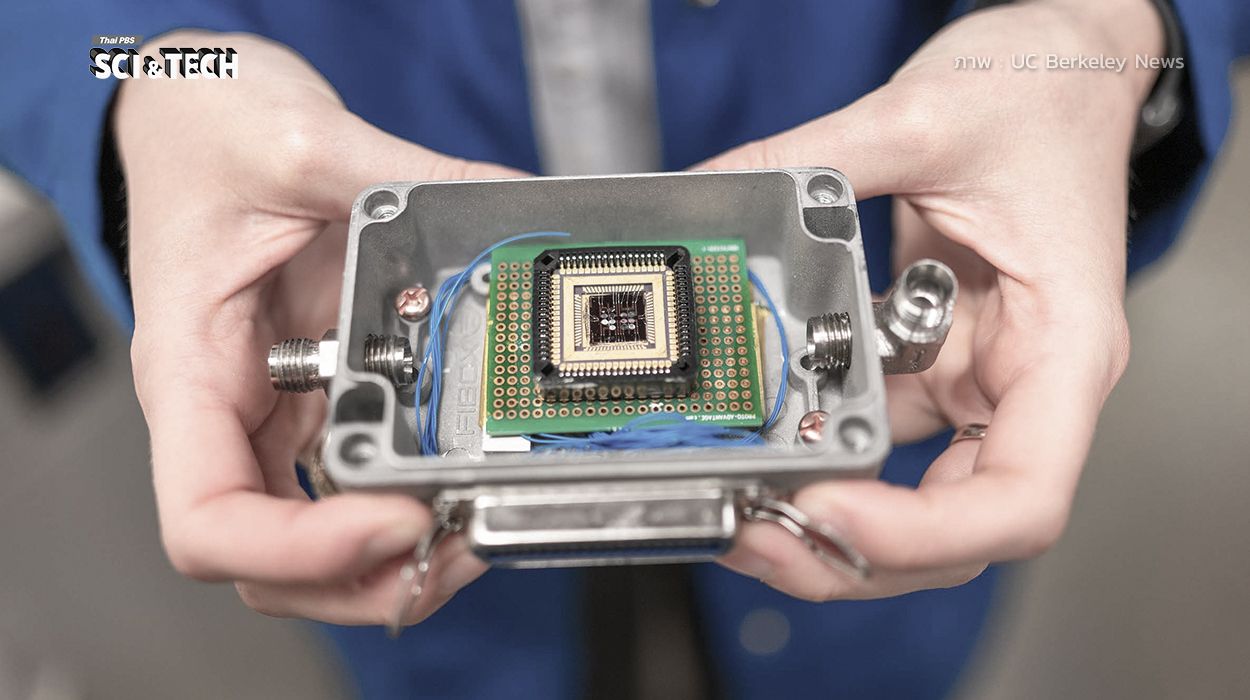
ทีมนักวิทยาศาสตร์ จากสถาบันเทคโนโลยีอิตาลี (Italian Institute of Technology) นำโดย Barbara Mazzolai ผู้อำนวยการห้องปฏิบัติการ Bioinspired Soft Robotics ได้พัฒนาเทคโนโลยีแขนกลที่เป็นหนึ่งในตัวอย่างแรก ๆ ของแขนกลนุ่มที่ฝังเซนเซอร์สัมผัสไว้ในปุ่มดูด เปิดทางให้หุ่นยนต์จัดการวัตถุได้ด้วยการสัมผัสโดยไม่พึ่งการมองเห็น
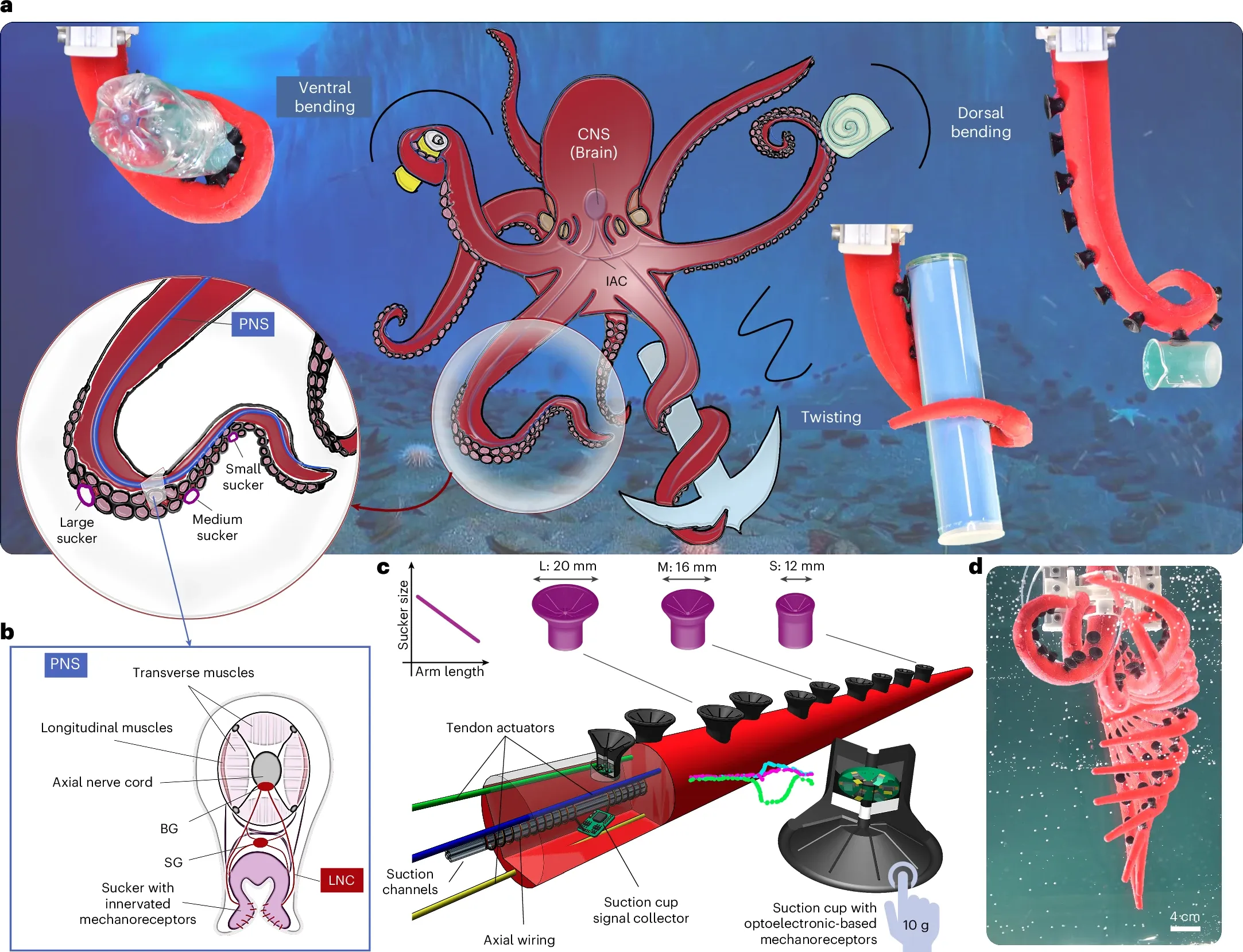
การทดลองและระบบการทำงานของแขนกลปลาหมึก
ภายในปุ่มดูดแต่ละอันมี LED และโฟโตทรานซิสเตอร์ขนาดจิ๋วสามคู่ทำหน้าที่เป็น "ระบบประสาท" ขนาดเล็ก เมื่อวัตถุสัมผัสปุ่มดูด ซิลิโคนจะเปลี่ยนรูปและส่งผลต่อรูปแบบการสะท้อนแสงภายใน ระบบแปลความเปลี่ยนแปลงนี้ออกมาเป็นสามข้อมูล ได้แก่ มีการสัมผัสหรือไม่ แรงมากน้อยแค่ไหน และมาจากทิศทางใด ความไวของเซนเซอร์อยู่ที่ประมาณ 400 มิลลิโวลต์ต่อนิวตัน โดยมีค่าคลาดเคลื่อนของแรงเพียง 0.1 นิวตัน และค่าคลาดเคลื่อนเชิงทิศทางเฉลี่ยประมาณ 8 องศา ซึ่งเทียบได้กับช่องว่างระหว่างตัวเลขสองตัวบนหน้าปัดนาฬิกา
การควบคุมทำงานสองระดับพร้อมกัน ระดับแรกคือการตอบสนองเฉพาะที่ ปุ่มดูดแต่ละอันมีวงจรอิสระที่จะดูดติดทันทีเมื่อตรวจพบการสัมผัส โดยไม่ต้องรอคำสั่ง ระดับที่สองคือการประมวลผลภาพรวม โดยรวบรวมข้อมูลจากปุ่มดูดทั้งหมดในช่วงเวลาประมาณสี่วินาที เพื่อตัดสินใจว่าจะม้วนแขนขึ้น ลง หรือบิดตัวในทิศทางใด
ทำงานใต้น้ำได้จริง
การทดสอบทั้งหมดดำเนินการใต้น้ำ แขนกลสามารถตรวจจับขวดแก้วและถ้วยพลาสติกขณะกำลังเคลื่อนที่อยู่ ประเมินน้ำหนักวัตถุที่จับได้อย่างแม่นยำ รวมถึงจัดการกับวัตถุที่วางในมุมต่างกัน เช่น ดาวทะเลเทียม น้ำหนักสูงสุดที่แขนกลรับได้อยู่ที่ประมาณ 500 กรัม และเซนเซอร์ยังคงความแม่นยำหลังการใช้งานซ้ำกว่า 300 รอบ อีกทั้งยังสามารถส่งข้อมูลแบบประหยัด เนื่องจากปุ่มดูดแต่ละอันส่งเฉพาะทิศทางการสัมผัสไปยังตัวควบคุมหลัก แทนที่จะส่งข้อมูลดิบทั้งหมด ทำให้ระบบใช้แบนด์วิดท์ต่ำ และสามารถขยายจำนวนปุ่มดูดหรือเพิ่มแขนกลได้โดยไม่ทำให้ความเร็วตอบสนองลดลง

ระบบปุ่มดูดเทียมของแขนกลในช่วงที่ตรวจพบการสัมผัส
จากใต้ทะเลสู่โครงสร้างพื้นฐานอุตสาหกรรม
การออกแบบแบบโมดูลาร์ทำให้สามารถปรับจำนวนและตำแหน่งของปุ่มดูดได้ตามภารกิจ งานที่มีศักยภาพสูงในระยะใกล้ ได้แก่ การตรวจสอบโครงสร้างใต้น้ำอย่างท่อส่ง สายเคเบิล และแท่นขุดเจาะ รวมถึงการเก็บตัวอย่างทางชีววิทยาในสภาพแวดล้อมที่หุ่นยนต์แบบแข็งเข้าไม่ถึง ทีมวิจัยวางแผนนำเทคโนโลยี neuromorphic computing มาเสริมในขั้นถัดไป เพื่อให้ระบบเลียนแบบวงจรประสาทธรรมชาติของปลาหมึกได้ใกล้เคียงยิ่งขึ้น
แขนกลหนวดปลาหมึกนี้ ไม่ได้เพียงแค่จับวัตถุ แต่ "ตัดสินใจ" ว่าจะจับอย่างไร ด้วยระบบประสาทเทียมที่กระจายอยู่ทั่วร่างกายแทนที่จะรวมไว้ที่ศูนย์กลาง หุ่นยนต์ตัวนี้จึงเป็นก้าวสำคัญสู่ยุคของหุ่นยนต์อ่อนตัวที่ฉลาด ปรับตัวได้ และทำงานได้อย่างน่าเชื่อถือในโลกที่ไม่แน่นอนอย่างท้องทะเลลึก หากการพัฒนาในขั้นต่อไปสำเร็จ เราอาจได้เห็นแขนกลที่สามารถสำรวจและซ่อมบำรุงโครงสร้างใต้น้ำได้อย่างอิสระ
เรียบเรียงโดย ขนิษฐา จันทร์ทร
ที่มาข้อมูล: newatlas, iit, nature
ที่มาภาพ: iit
อัปเดตข้อมูลแวดวงวิทยาศาสตร์ เทคโนโลยี รู้ทันโลกไอที และโซเชียลฯ ในรูปแบบ Audio จาก AI เสียงผู้ประกาศของไทยพีบีเอส ได้ที่ Thai PBS
“รอบรู้ ดูกระแส ก้าวทันโลก” ไปกับ Thai PBS Sci & Tech